
短短几个月, 一个“外行数学家”, 解决了几何领域最大的问题之一
想象你走进一家水果店,看见店员正在把橘子一层层地码放在摊位上。你会发现他们往往采用一种类似金字塔的排列方式:底层摆成一个紧密的三角形,第二层再在凹陷处叠上去,接着第三层……这种方式不光稳定,还特别节省空间。
这不是巧合,而是数学。
400多年前,物理学家约翰内斯·开普勒(Johannes Kepler)就提出:在三维空间里,最紧凑的球体堆积方式,就是模仿水果摞法。他计算后发现,这种堆法最多只能填满约 74% 的空间,剩下的26%是无可避免的空隙。
这个猜想听上去再直观不过,然而数学界用了近四个世纪才最终证实它是对的。直到1998年,美国数学家托马斯·黑尔斯(Thomas Hales)借助大量计算机验证,才彻底完成了这个证明。如此耗时之久,足见这个问题背后的复杂性。
但这仅仅是个开始。
因为现实世界的数学应用,远不止三维。密码学、信号传输、压缩编码、甚至人工智能中某些模型训练,都依赖于“高维空间”——不是你能在房间里看到的三维,而是10维、100维、甚至百万维的抽象空间。
问题来了:如果在三维中堆球已经这么难,那在高维呢?
这便是著名的高维球堆积问题(high-dimensional sphere packing problem)。
数学家希望在这些高维空间中,找到一种方式,把“球”——其实是一种高维等距结构——尽可能紧密地排列在一起,占据最多的空间,同时不重叠。不同于现实世界的球,高维球的行为非常反直觉,连球体的“体积”在高维中都会变得奇异。
例如,在50维以上,大多数球的体积集中在非常薄的一层壳上,类似一个空心泡沫。堆积这些“泡沫球”,比堆实心球还要困难得多。
即便如此,科学家仍然要继续努力。因为球堆积不仅是个纯粹的几何挑战,它直接关系到我们今天使用的各种通信系统:卫星传输、数据压缩、甚至加密算法的极限效率——本质上都可以抽象为“在高维空间中找最紧密的球堆积”。
但除了两个令人惊讶的例外:第8维和第24维,我们对其它所有维度的最优堆积方式,至今仍然未知。而在大多数高维中,我们连是否已经接近最优都说不准。
这就是数学最迷人的地方:一个看似简单的“怎么码球”的问题,背后牵动着几百年的智慧交锋,以及数不尽的技术应用。
而故事真正的转折点,正在悄悄酝酿——在一个被人遗忘的方法中,在一位“局外人”的好奇心里。
被遗忘的方法:Rogers的椭球构想
在高维空间中寻找最密集的球堆积方式,长期以来都是“点阵”的天下。
所谓点阵,就是一种在空间中周期性重复的点的排列方式。想象一张无尽延展的网格,每个交点都可以看作是球心,球就以它们为中心扩展开来。这种方法源自1905年,数学家赫尔曼·闵可夫斯基(Hermann Minkowski)提出的直观模型——通过找出最合适的点阵结构,进而推导出最优的球堆积。
在二维平面上,这种方法确实能找出最紧密的排列:蜂窝状的六边形结构。每个圆被六个邻居包围,几乎没有任何浪费。这种优雅的模式,也被证实是平面上最有效的圆形堆积方案。
但到了高维,问题变得极其复杂。
首先,高维空间里点阵的种类呈指数增长,穷尽它们成为不可能的任务。其次,就算选出一个还不错的点阵,你也很难判断是否已经逼近最优。于是,整个领域在几十年间陷入了微小改进、渐进优化的死循环里。
就在这样的背景下,1947年,英国数学家克劳德·安布罗斯·罗杰斯(Claude Ambrose Rogers)提出了一个不走寻常路的想法。
他没有沿用闵可夫斯基那一派“找好点阵再画球”的方法,而是提出:哪怕点阵本身不是最优的,我们也许可以通过一种新的方式,把球塞得更紧密。
他的武器,是一个非常特别的几何体:椭球体(ellipsoid)。
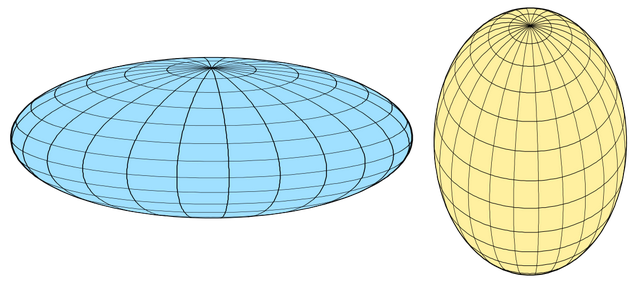
与完美对称的球不同,椭球在不同方向上可以有不同的长度,像是被拉长或压扁的球体。它的形状不受半径限制,而是由多个轴决定,越高维,参数就越多。罗杰斯的想法是,先在点阵中选择一个点,然后围绕它画一个椭球,使其恰好不触碰到其他点。接着,他设计了一种算法,把这个“定制椭球”转化为实际的球堆积,从而构建出一个新的、可能更密集的结构。
这个策略一度引起了关注。它有一个很大的优势:你不需要一个完美的点阵,只要选对了椭球的形状,就有可能得到更高效的球堆积。
但这个方法也有致命的弱点:选择椭球太难了。
在二维或三维空间里,椭球还算容易控制。但一旦维度升高到十几、几十,甚至上百维时,椭球就变成了一个拥有数十、数百个自由度的怪物。每个维度都像是一根可以伸缩的杆子,组合方式呈天文数字级别地增长。在没有明确规则引导下,没人知道椭球到底应该怎么“长”,怎么“缩”,才能做到最佳避让。
这就像拥有一把万用钥匙,却不知道门锁长什么样。
随着时间推移,数学家们逐渐对这条路径失去了信心,纷纷回到更可控、结构更明确的“点阵路线”。Rogers的方法,被悄然搁置在了历史角落,几十年无人问津。
但令人意想不到的是,这个几乎被遗忘的构想,后来竟成为了突破高维堆积瓶颈的关键。
它只是缺了一个真正懂得如何使用它的人。
一位“外行”数学家的临时起意
Boaz Klartag 并不是一位研究点阵或编码理论的大师。他的专长是几何,尤其是凸体几何(convex geometry)。这是一个看似与高维球堆积不搭界的领域,研究的是那些没有凹陷、形状平滑的几何体,比如球体、椭球、多面体等。

Klartag 对几何的理解极为深刻,尤其是在高维空间中凸体如何变形、如何扩张收缩、如何与其他形体“相处”的方式。他长期关注高维中对称性和几何结构的奇妙行为,却从未正式涉足点阵和球堆积研究。他自己也承认:“我一直对这个领域感兴趣,但从来没有时间认真钻研。”
直到有一天,他突然腾出了时间。
2024年11月,Klartag 刚刚完成一项长期研究项目,日程突然变得前所未有的清闲。这一年,他47岁。许多数学家在这个年龄早已固守专业,进入稳定的研究轨道,但 Klartag 却反其道而行之。
他说:“我当时想,如果我不趁现在试试,一辈子可能都不会再有机会了。”
于是,他拨通了好友、以色列数学家 Barak Weiss 的电话,请求对方做他进入点阵世界的“领路人”。Weiss 没有犹豫,两人很快组织了一个小型研讨班,找来几位年轻研究者,从头开始研读点阵理论和球堆积领域的关键文献。
而就在这个阅读过程中,Klartag 重新发现了 Rogers 的那篇1947年论文。
多数人只是把这篇论文当作一段历史背景资料翻阅,而 Klartag 却从中嗅到了一种熟悉的气息:这是一个凸体几何的机会窗口。
Rogers 的方法以椭球为核心,而椭球正是 Klartag 操作得最为熟练的几何工具。在他的世界里,控制一个高维椭球的形状,并不是不可能的任务,而是一门技巧、一套方法论。他多年来研究的正是如何让这些形体在抽象空间中“聪明地生长”与“高效地避让”。
他一眼就看出:Rogers 所使用的“初始椭球”过于朴素、效率不高。几十年前还不具备改进这些椭球的工具,而现在,Klartag 手里正好就握着这些工具。
他意识到,自己或许可以用完全不同的方式重新定义椭球的“成长路径”——不是一口气生成一个理想形状,而是让它一点点在空间中膨胀试探,每次都巧妙地避开障碍点,最终形成一个比历史上任何一个更大的可行椭球。
只要这个椭球比 Rogers 的原始版本更大,就能以 Rogers 的老方法反推出更密集的球堆积结构。
这时,Klartag 还没有任何结果,也没有正式启动证明。但他有一种直觉:这条路值得走,而且只有他走得下去。
随机膨胀:椭球如何在高维中避开障碍
Klartag 面临的挑战并不在于理论的可行性,而在于如何实际构造出一个比历史更大的椭球体——一个能在不碰撞点阵中任何一个点的前提下,“自由伸展”出最大体积的凸体。
如果这个椭球能比 Rogers 在1947年使用的那个更大,那么用它反推出的球堆积也必然更加紧凑——这是数学上的直接逻辑。
问题是:怎样才能在高维空间中“长”出这样一个椭球?
我们可以把这个问题类比为在一个布满钉子的黑屋子里撑一把伞。你不能提前知道钉子的位置,只能小心翼翼地撑开伞,一旦某个方向碰到钉子,就不能再继续展开。但别的方向仍然可以继续张开,只要还没有碰撞到。
Klartag 的方法,就是让椭球像这种“有条件的伞”一样,按规则向外膨胀。
他设计了一个随机化的生长过程。在这个过程中,椭球不会平均地、同步地扩张,而是:
随机选择一个方向,向外略微膨胀;
检查边界是否触碰到点阵中其他点;
如果触碰到,则立即“冻结”这个方向的生长;
其他未碰撞的方向继续尝试,循环进行。
这一过程在高维中尤为关键。因为高维空间具有惊人的自由度,每一个维度都像是一根可以独立控制的张力杆。Klartag 让椭球在“能长”的地方继续生长,而“不能长”的地方停下来,这种方式既节省了空间探索的资源,也最大程度地利用了高维的方向自由。
最终生成的椭球,其边界并不是光滑均衡的,而是一种带有“撞痕”的不规则凸体:它在某些方向早早就被“撞停”了,但在其他方向却鼓足了勇气往外“探险”。
这种不对称,看似凌乱,实则有效。
更重要的是,这个过程是概率性的。每次运行,它产生的椭球形状都可能不同——这正是传统数学方法很难接受的“不确定性”,但对 Klartag 来说,这正是他的几何直觉发挥作用的舞台。
他反复评估这种随机生长法生成的椭球体积分布,只要其中哪怕有一部分能超过 Rogers 的椭球,那就足以构造出新的球堆积纪录。
而事实证明,他的直觉是对的。
短短一两周内,他完成了关键的数学证明:他的生长机制,确实能在一定概率下生成比历史更大的椭球。



